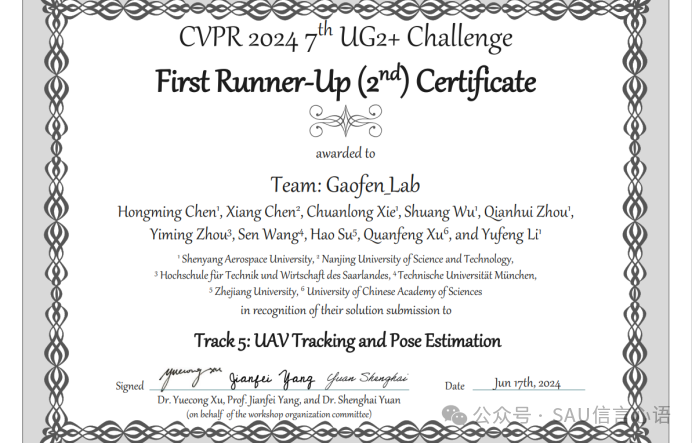
热烈祝贺电子信息工程学院李玉峰教授团队获得CVPR2024-UG2+无人机跟踪和姿态估计赛道亚军。
近日,国际顶级会议CVPR 2024举办的第七届UG2+挑战赛结果公布。在电子信息工程学院院长李玉峰教授的指导下,我院21级硕士研究生陈鸿铭,22级硕士研究生周千惠,23级硕士研究生解传龙、仵爽联合南京理工大学博士生陈翔与慕尼黑工业大学、浙江大学、中国科学院大学等高校合作获得无人机跟踪和姿态估计赛道国际亚军。
CVPR是IEEE Conference on Computer Vision and Pattern Recognition的缩写,即IEEE国际计算机视觉与模式识别会议。该会议是计算机视觉和模式识别领域最重要和权威的国际顶级会议,由电气与电子工程师协会(IEEE)和计算机视觉基金会(CVF)共同主办。UG2+挑战赛是其举办的重要赛事之一。
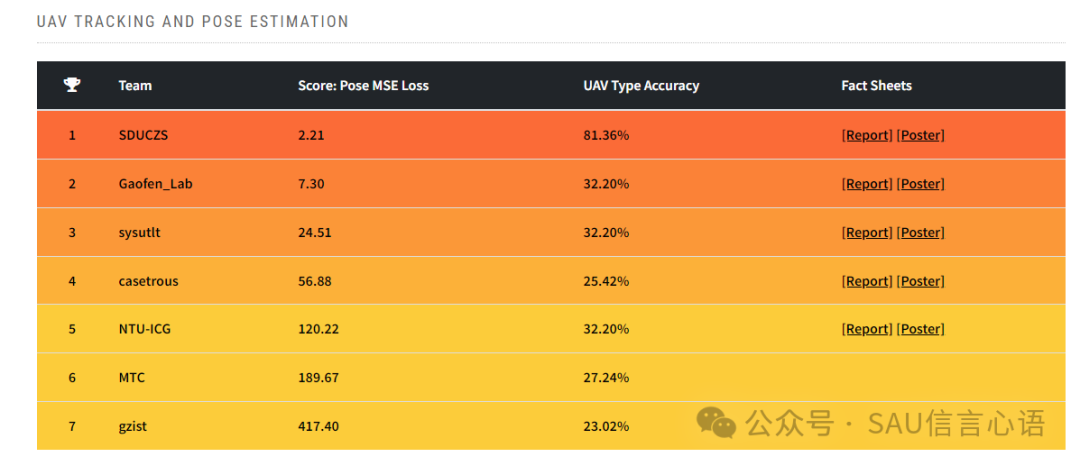
该赛事是由新加坡国立大学和南洋理工大学等知名高校和机构联合主办,重点关注小型商用无人机的增长会引发多方面安全挑战。该项赛事参加院校众多,吸引了包括上海交通大学、电子科技大学、大连理工大学、香港科技大学(广州)、东京大学、慕尼黑工业大学、沈阳航空航天大学等高校团队参加。其中冠、亚、季军获奖队伍的第一单位分别是上海交通大学、沈阳航空航天大学、中山大学。
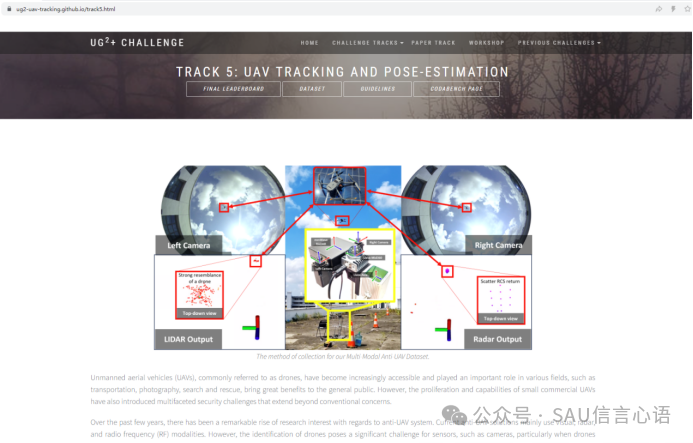
在过去几年中,针对反无人机系统的研究兴趣显著增长,当代反无人机研究的主要焦点在于对象检测和2D追踪,而忽视了3D轨迹估计的关键整合。无人机的识别对传感器(如相机)来说是一个重大挑战,特别是当无人机在高海拔或遇到极端视觉条件的情况下。因为它们的尺寸紧凑,导致雷达截面积减小和视觉存在减少。当前的反无人机解决方案主要使用视觉、雷达和无线电频率(RF)模态。因此,该赛道挑战的目标是整合来自不同模态的特征,以实现在某些传感器可能无法获取有效信息的困难条件下的稳健的3D无人机位置估计。